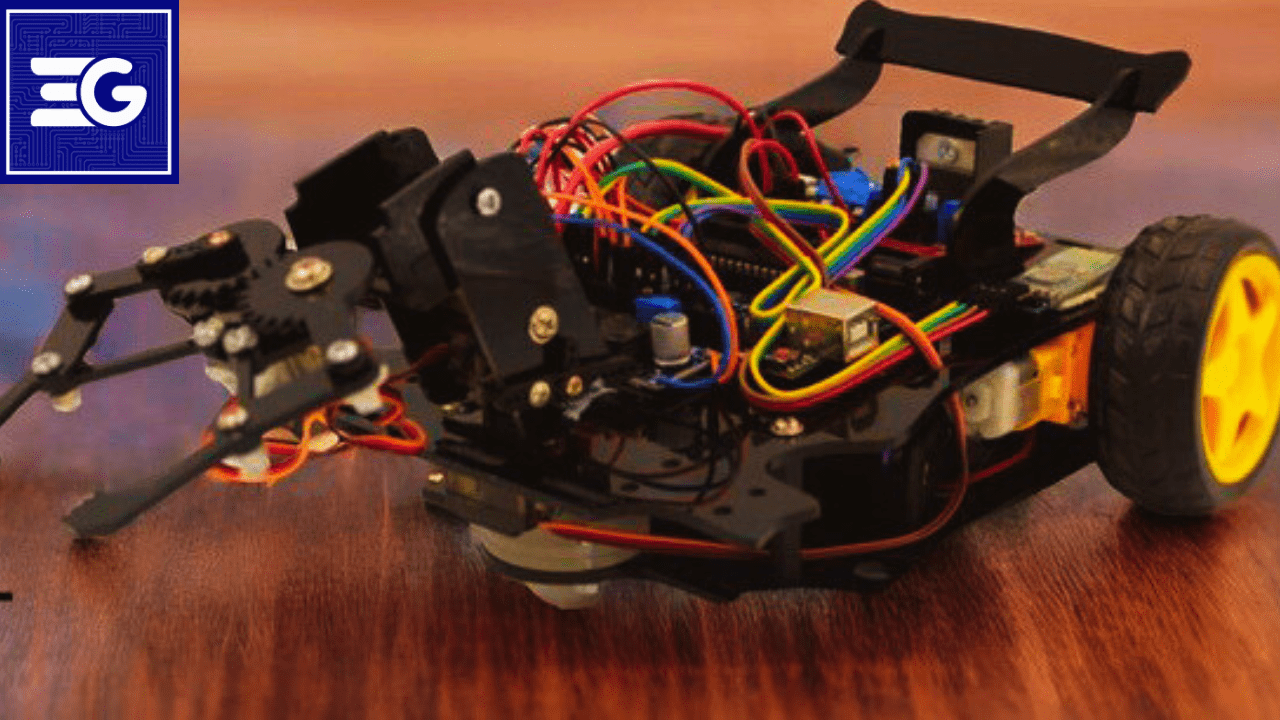
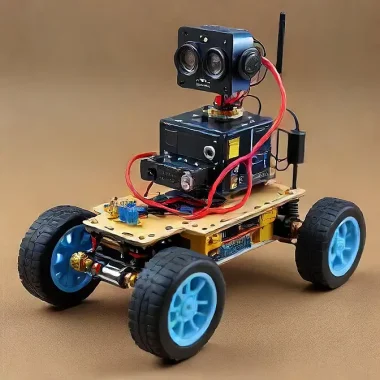
Arudino, Robotics Arduino Bluetooth-Controlled Robotic Arm Car for Pick and Place Tasks By Tanmay Malhotra. Posted on October 5, 2024
 EGPT
EGPT