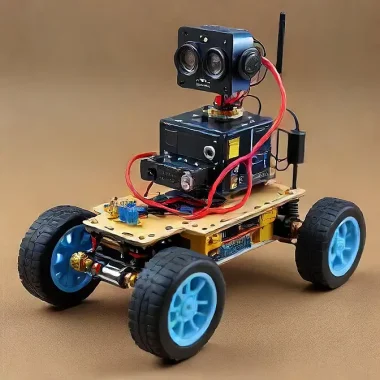
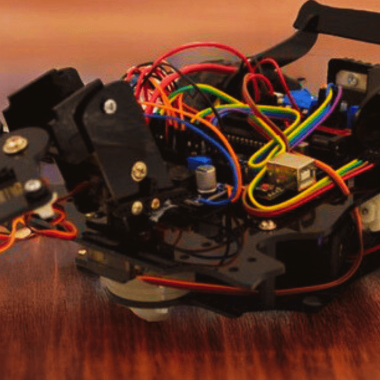
Arudino Robotics Projects: Development of the Following a Human Robot Control Using Arduino with Ultrasound Sensors By Tanmay Malhotra. Posted on October 20, 2024



 EGPT
EGPT